
自动驾驶及智能驾驶仿真测试平台VTD
VTD(Virtual Test Drive)是由德国VIRES公司开发的自动驾驶及智能驾驶仿真测试平台,现隶属于海克斯康(Hexagon)工业软件体系。该软件专注于复杂交通环境的建模与仿真,覆盖从道路网络设计、动态场景配置到多传感器仿真的全流程,支持自动驾驶系统在模型在环(MiL)软件在环(SiL)、硬件在环(HiL)、驾驶员在环(DiL)及车辆在环(ViL)等V流程全阶段的测试验证。

Jump to 你喜欢的部分😉
一、产品概述
VTD(Virtual Test Drive)是由德国VIRES公司开发的自动驾驶及智能驾驶仿真测试平台,现隶属于海克斯康(Hexagon)工业软件体系。该软件专注于复杂交通环境的建模与仿真,覆盖从道路网络设计、动态场景配置到多传感器仿真的全流程,支持自动驾驶系统在模型在环(MiL)软件在环(SiL)、硬件在环(HiL)、驾驶员在环(DiL)及车辆在环(ViL)等V流程全阶段的测试验证。
VTD基于Linux平台开发,提供高精度实时渲染能力,能够模拟包括雨雪雾天气、光照变化、路面反光等复杂环境效果,并支持完美传感器和复杂的物理级传感器仿真。其模块化架构兼容多种国际标准,如ASAM OpenX系列标准(OpenDRIVE、OpenCRG、OpenSCENARIO等),软件平台开放,可灵活集成第三方工具,广泛应用于汽车主机厂、零部件供应商及研究机构。
二、核心功能与技术特点
1、静态道路环境建模
VTD提供图形化的交互式路网编辑器Road Designer(ROD),可用作3D场景创建的基础。支持用户快速构建包含多车道、交通标志、信号灯等元素的复杂道路网络,并同步生成符合OpenDRIVE标准的高精地图。通过内置的3D模型库和纹理资源,ROD可创建具有国家/地区特色的道路场景(如交通标志、绿化带等),同时支持路面细节建模(如OpenCRG格式的微观路面纹理)。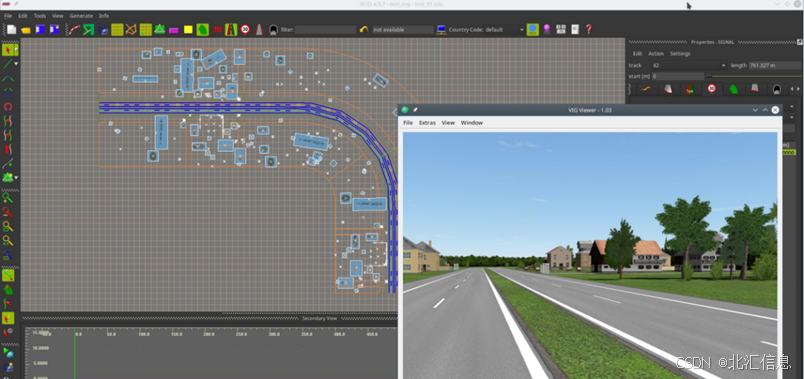
2. 动态场景配置
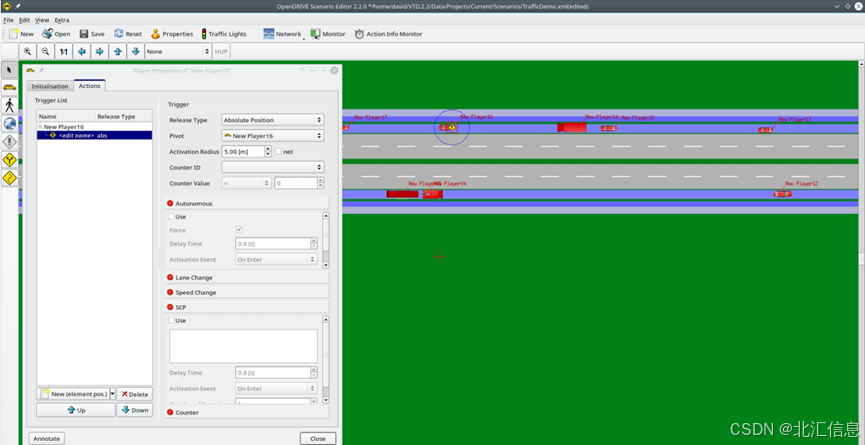
基于OpenSCENARIO标准,VTD的Scenario Editor支持路径定义、自带180+ 车辆模型库,允许用户定义动态交通行为,包括车辆轨迹、行人运动、交通流生成等。用户在仿真过程中可实时通过脚本或图形界面配置(时间/事件触发)交通参与者的行为逻辑(如超车、变道、加速及紧急制动)。可模拟极端工况(如边缘案例)以验证自动驾驶系统的鲁棒性。
3. 传感器仿真
VTD支持完美级及物理级传感器建模,针对于不同层级算法测试,可提供目标信息列表及原始数据,涵盖摄像头(Camera)、激光雷达(Lidar)、毫米波雷达(Radar)、超声波雷达(USS )等主流传感器:
(1)基于VTD内置的完美传感器,可用于毫米波/超声波雷达目标级仿真,输出目标信息列表,如目标ID、类型、属性、距离、速度等,可验证规控算法。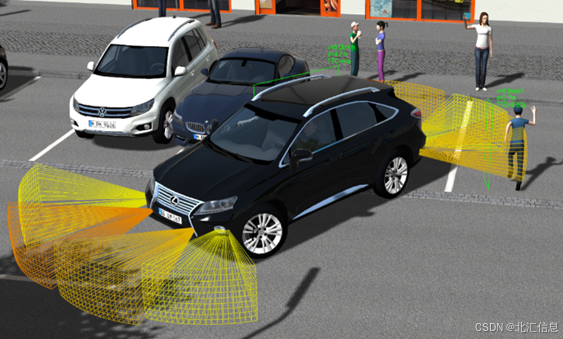
(2)摄像头仿真
模拟真实相机的光学特性,包括镜头畸变(基于OpenCV参数或实验拟合)、CMOS传感器响应(RGB到YUV/RAW图像数据转换)、ISP后处理(自动曝光、白平衡调节)及噪声效果(雨滴、光晕、图像失真等)。此外,可生成语义分割图与深度图,为视觉算法提供标注数据。
(3)物理传感器
激光雷达仿真
基于光线追踪技术,生成点云数据并模拟多线束扫描特性,支持障碍物反射率、分辨率、天气干扰等物理效应,可通过SDK自定义。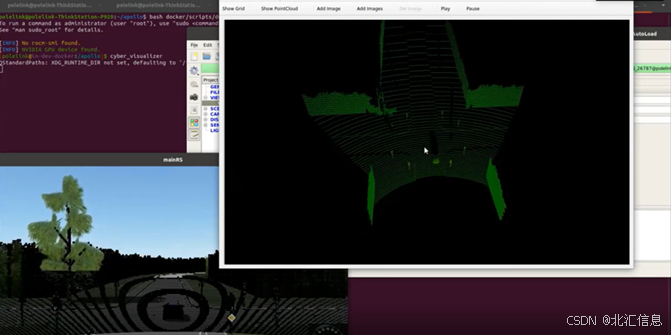
毫米波雷达仿真
基于PBR物理渲染特性,模拟点云信息,可设置天线增益图谱、噪声、失真、反射强度、天气干扰等,可验证雷达感知算法。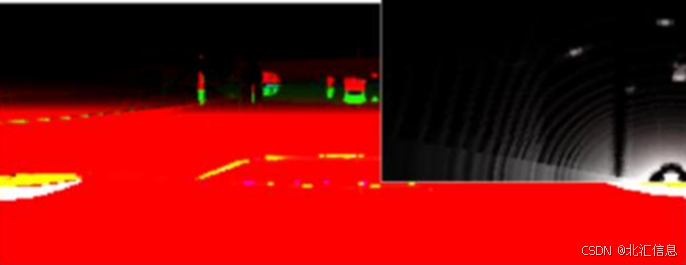
超声波雷达仿真
基于光学追踪进行SDK开发定义的物理模型,支持输出超声波FreeSpace自由空间点位的飞行时间/距离、坐标,可配置FOV和安装位置、仿真频率等。
4. 高精度渲染与实时仿真
VTD支持雨雪雾渲染,采用基于物理的渲染技术(PBR),实现高质量实时光影效果、动态天气变化及复杂材质表现(如路灯/车灯仿真及反光、路面湿滑等)。其实时渲染引擎支持多显示器同步输出,并可通过云端部署进行大规模并行流程仿真,比实时仿真更快完成数十亿次虚拟测试,显著提升ADAS及AD系统测试效率。
5. 自动化测试支持与多平台集成
VTD提供自动化测试工具链,通过开源Python实现自动化测试,也可以结合商用成熟的自动化测试软件,如(Vector公司vTESTstudio、Synopsys公司TPT等),实现更加快速便捷的自动化测试。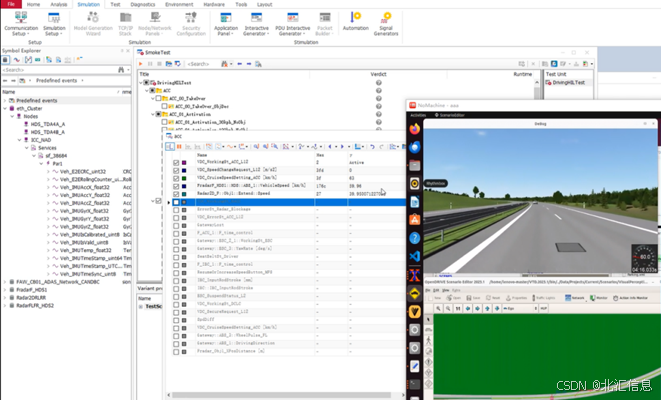
此外,软件支持故障注入(如镜头裂痕、噪点、污泥等)仿真,可用于故障注入功能安全测试。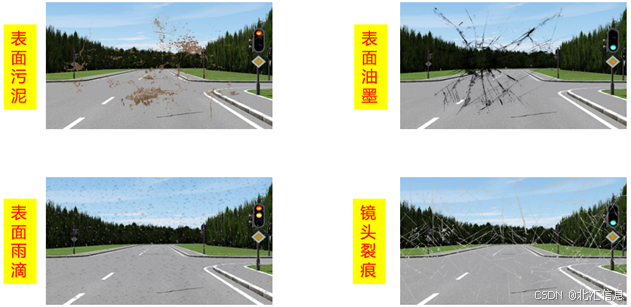
其多传感器仿真同步机制及开放式接口(如SDK),便于与车辆动力学模型(如DYNA4)、AI驾驶员算法及第三方测试平台(如Vector ADAS HIL设备)集成,形成闭环测试系统。 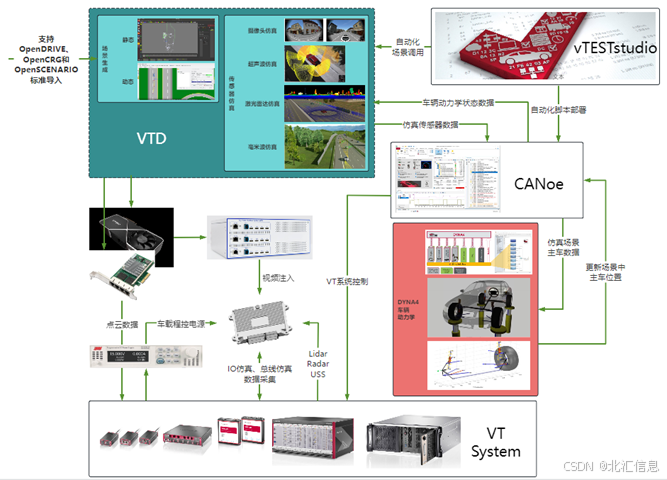
三、典型应用场景
-
自动驾驶算法开发与验证
通过模拟复杂交通场景(如交叉路口拥堵、行人突然横穿),验证感知、决策与控制算法的可靠性。例如,利用语义分割图像训练目标检测模型,或通过深度图优化距离估计算法。 -
传感器性能验证
在虚拟环境中模拟复现真实相机的光学特性与噪声,评估摄像头在欠光/强曝光/对比度等极端条件下的成像质量,或测试激光雷达在雨雾天气中的点云稳定性。
-
智能座舱测试
结合AR-HUD(增强现实抬头显示)仿真,模拟虚拟图像与真实环境的融合效果。VTD基于开放架构和接口实时接收AR-HUD生成的影像图层数据,并在渲染引擎中叠加显示,验证信息投射的准确性与实时性,以此实现智能座舱/智能网联一体化测试。
-
边缘案例挖掘
利用云端并行计算能力,批量生成数百万种罕见场景,加速发现自动驾驶系统的潜在风险,降低道路实测成本。
四、技术优势总结
-
全链路仿真支持
覆盖从静态地图构建、动态场景生成到传感器数据输出的完整流程,满足MiL/SiL/HiL/DiL/ViL全阶段测试需求。 -
高逼真度与开放性
基于物理的传感器模型与开放标准(OpenDRIVE/OpenSCENARIO),确保仿真结果与真实数据的高度一致,同时兼容行业主流HiL平台(如Vector 等)。 -
高效能计算架构
支持单机运行与云端分布式并行部署,可快速完成大规模场景测试,显著缩短开发周期。 -
行业应用广泛性
已在奥迪、宝马、奔驰及一汽、长安等国内外知名整车厂的ADAS/AD系统开发中成熟应用,并扩展至轨道交通与航空领域。
五、总结
VTD是使用广泛的开放平台,用于创建、配置和动画化仿真环境以及用于ADAS和自动驾驶汽车的培训、测试和验证的场景。VTD凭借其全面的功能模块、高精度仿真能力及灵活开放的集成特性,已成为自动驾驶开发领域的核心仿真工具之一。随着智能网联技术的快速发展,VTD将持续优化云端协同与AI数据驱动的测试方案,为行业提供更高效、安全的虚拟验证平台。
北汇信息作为海克斯康的重要合作伙伴,借助VTD虚拟场景仿真优势,结合北汇信息的总线仿真及系统集成测试经验,为客户提供优质的智能网联测试解决方案、测试系统和服务。


获取更多汽车电子技术干货
更多推荐
 25
25 0
0- 0



 已为社区贡献219条内容
已为社区贡献219条内容

所有评论(0)