
【资料获取】ADAS自动泊车辅助系统测试方法详解
德国《Auto Motor und Sport》与MdynamiX联合开展第三期ADAS测试,聚焦自动泊车功能。测试涵盖特斯拉Model Y、沃尔沃EX30、蔚来ET5T和奔驰E级四款车型,通过厘米级定位系统和专业设备采集数据。结果显示:车位识别能力有限、泊车中断频发、方向盘逻辑差异大等问题普遍存在。完整报告包含详细测试方法和数据,可通过北汇信息获取。该测试为行业提供了自动泊车系统的客观评估参考。

📍Auto Motor und Sport × MdynamiX 联合测试专辑·第三期
在本期德国《auto motor und sport》ADAS专题中,我们聚焦于一项日常驾驶中高频使用、但仍具挑战性的功能——车辆自动泊车能力。
本轮测试由 MdynamiX AG 牵头,涵盖以下四款主流车型:
• 特斯拉Model Y
• 沃尔沃EX30
• 蔚来ET5T
• 梅赛德斯E级
测试过程全面模拟日常泊车环境,包含侧方停车与倒车入库两个标准场景,力求呈现系统在识别、转向、距离控制、换挡逻辑等方面的真实表现。
📥 完整测试图表及详细数值已整理为中文版PDF,点击文末“阅读原文”可直接申请获取。
🧪 测试结构与方法亮点
本次测试在 MdynamiX 场地进行,工程师通过厘米级定位系统与模拟标定装置构建了接近真实的泊车测试环境,并通过如下设备记录全过程:
• 每车配备 双天线测量头(WLAN + GNSS多系统定位)
• ADMA-G ProPlus 动态传感器 实时采集速度、加速度与转向动态
• 安装在遮阳板上的摄像头同步记录方向盘上二维码贴纸的旋转,用于 MXoptiCal 图像标定系统分析方向盘操作过程。MXoptiCal 是 MdynamiX 开发的高精度光学测量系统,精度达 ±7mm,它无需接入车辆总线即可测量转向角,是评估驾驶行为与系统响应的理想工具。
• 所有数据最终通过 MXeval 测评平台 分析和输出关键图表、误差区间与动作过程
📊 部分测量数据一览(以技术维度展示)
测试中记录了以下典型参数(单位已标准化):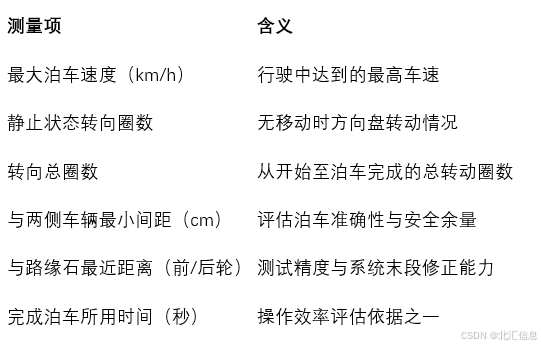

测试中发现的问题点
• 泊车位识别能力有限:尤其在模拟真实街边停车场(替代标线为金属杆)时,大部分系统无法持续稳定识别车位。
• 泊车中断现象常见:测试过程中,不同车型均在部分场景中出现过系统提示驾驶员“接管泊车操作”的情况。
• 方向盘逻辑差异大:有的车型习惯在车速阶段迅速打满,有的则在静止时完成大幅转向。
• 识别误差与实际余量不一致:部分系统显示的可视距离与实际GNSS测量结果偏差达到10cm以上。
MdynamiX × 北汇信息
本次测试由德国 MdynamiX AG 组织完成,该机构长期致力于自动驾驶、NVH及驾驶行为建模评估,与慕尼黑工业大学、肯普滕应用科技大学等机构保持密切合作。
MXeval 是一套支持 ADAS、SBW、ESC、AEB、LKA 等测试任务的评价平台,结合客观数据采集与主观体验记录,为OEM/Tier1研发和认证提供强力支撑。
北汇信息作为其在中国的长期合作伙伴,协助此次内容的整理、翻译与工具引入工作,并为国内用户提供MXeval等工具的试用对接。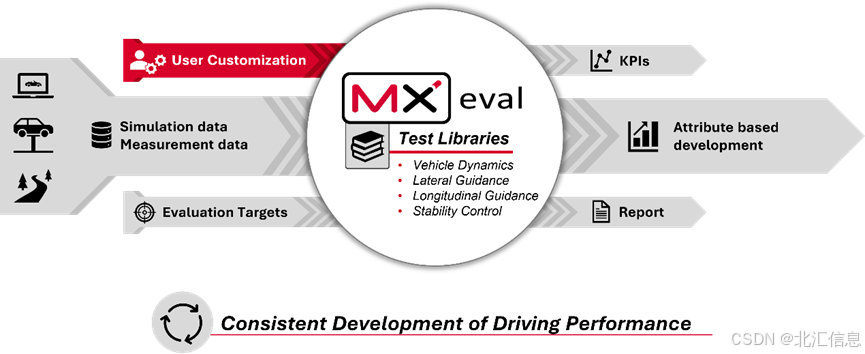
📥 获取完整报告与工具试用
无论您是主机厂工程师,还是对智能辅助驾驶感兴趣的行业从业者,这份报告将为您提供一手的测试方法与真实测量数据参考。
完整版包含所有车型在不同泊车方式下的详细行为参数、过程照片与图表展示,如需获取中文译文版/德文原版,请点击下方“阅读原文”或联系北汇信息市场部(📧marketing@polelink.com)。


获取更多汽车电子技术干货
更多推荐
 4
4 0
0- 0



 已为社区贡献234条内容
已为社区贡献234条内容

所有评论(0)