
诊断路由功能及测试方案介绍
假如网关每个子网段的最大并行能力是3,测试则根据诊断路由表在每个子网段选择3个ECU地址仿真队列发送诊断请求,每个诊断请求被路由到子网段之后仿真发送诊断响应,等待诊断响应转发到上层网段之后再仿真发送诊断请求,以此类推测试执行5min,检测过程中的所有诊断请求和响应转发是否正常。测试方法:假如网关每个子网段的最大并行能力是3,测试并行请求转发则根据诊断路由表在每个子网段选择3个ECU地址仿真发送诊断
一、前言
随着车内通信技术(如OTA、SOME/IP、DDS)的快速发展,网关作为整车网络的核心枢纽,其路由能力至关重要。OTA 升级对网关的诊断路由性能提出了更高要求;而 SOME/IP 和 DDS 等通信技术的普及,则要求网关具备强大的 S2S(Signal to Service)路由能力。本文将重点探讨网关的诊断路由功能,并分享其性能测试方案。
二、网关功能介绍
依据在整车网络中的核心角色,网关通常具备以下关键功能:
- 协议转换:实现不同总线协议之间的数据转换与转发(如信号路由:CAN ↔ ETH;诊断路由:DoIP ↔ DoCAN)
- 路由功能:基于预定义规则或策略(如路由映射表),实现数据帧/报文在不同网络域间的定向转发
- 部分网络(PN)管理:依据整车休眠唤醒策略,协调并控制所连接各网络域的休眠与唤醒时序
- 外部通信接口:作为整车网络与外部环境(如诊断仪、云端服务器)进行数据交换的核心接口
- 网络安全防护:作为关键安全边界节点,实施严格防护机制(如防火墙、访问控制、安全诊断路由、安全刷写等),隔离外部威胁,防范未授权访问、恶意攻击及数据泄露
- 其它功能:如数据过滤、时间同步等
面向智能网联汽车高度集中化、服务化(SOA)的电子电气架构(EEA)演进,网关的核心角色与功能需进行相应优化与强化。
- 域间中枢:在域跨域融合/域集中式架构下,网关的核心作用更加凸显,成为连接动力域、底盘域、车身域、智驾域、座舱域等关键区域的核心通信枢纽。
- 高效数据处理:需支持更高带宽和更低延迟的数据交换,以满足智能驾驶、车联网等对实时性要求极高的应用需求。
- 服务化支持:在SOA架构中,网关的信号路由功能需扩展支持服务(Service)的发现、路由和转换(如SOME/IP),实现跨域的服务调用与数据共享。
- 支持OTA与诊断:需提供安全、可靠且高效的通道,支持大规模的固件空中升级(OTA)和远程诊断(Remote Diagnostics)。
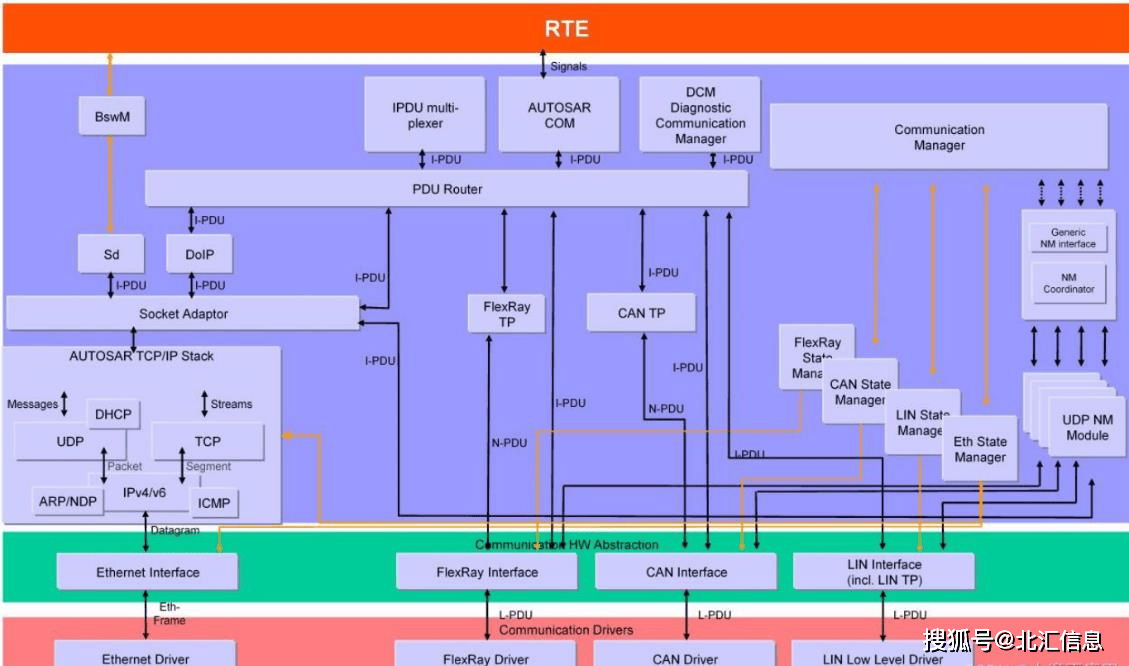
AUTOSAR软件架构示意图编辑
在AUTOSAR软件架构下,网关的路由功能根据是否经过COM → RTE → SWC处理,可分为以下两个层级:
PDU路由:
- 机制:直接基于完整的协议数据单元(PDU)进行转发,不解析PDU内部的信号内容。范畴:报文路由(如CAN帧转发)、诊断路由(如DoIP报文转发)均属于此层级。
信号路由
- 机制:解析PDU中的具体信号或服务,实现跨总线/域的信号映射、重组与转换。范畴:信号到信号的转换(Signal to Signal)、信号到服务的转换(Signal to Service, S2S)均属于此层级。
三、诊断路由功能介绍
综上所述,作为整车网络的核心通信枢纽,网关需支持多层次路由能力(如PDU路由、信号路由)以满足复杂功能需求。其中,诊断路由因其应用场景的显著差异,需进行定制化设计与实现。主要包含以下三类:
OBD诊断路由
OBD诊断路由是指诊断请求源自OBD端口的诊断报文路由。根据OBD端口类型(DoIP端口或CAN端口)及使用场景,其路由实现存在差异:
DoIP端口路由:
- 典型场景:样件软件更新:诊断测试仪通过DoIP端口连接网关。网关需支持DoIP ↔ CAN(FD)/LIN协议转换:诊断请求DoIP →其他总线协议,诊断响应为其他总线协议→DoIP。ZEV (零排放车辆) 诊断:为满足法规对零排放车辆关键数据的标准化读取与验证要求,网关需要具备路由特定ZEV诊断服务请求至目标ECU的功能。DoIP↔DoIP路由:
DoIP ↔ DoIP路由则取决于路由策略,如果车辆内部ETH节点IP不可见,需网关支持IP地址转换(NAT)功能,以实现外部设备对内部ETH节点的访问。反之,IP可见无需支持NAT功能,可通过交换机透传方式直接访问内部ETH节点
CAN端口路由:
- 典型场景:排放信息读取:诊断测试仪(通常基于CAN(FD)协议)读取排放相关数据。网关需支持CAN ↔ CAN(FD)协议转换。样件软件更新(J2534):J2534标准设备(通常使用CAN)更新软件。出口车辆网关必需支持 CAN扩展帧→ CAN(FD)标准帧转换(以满足J2534国际标准)。特殊需求:
若OEM要求通过CAN端口(诊断仪仅支持CAN)更新整车ECU软件,网关需支持CAN ↔ DoIP/CAN(FD)/LIN协议转换。
上述协议转换过程涉及安全防护机制或流量控制,无论源端和目标端总线协议是否相同(如CAN转CAN)。若需在传输层(TP)进行组包与拆包,其实现方式也归类到协议转换的范畴。反之,若无需协议转换或TP层处理,可采用透传方式,其路由方式与报文路由一致,路由性能达到最优。
OTA诊断路由
OTA诊断路由是指路由路径为诊断请求源自OTA Master(空中下载主控单元)。OTA(Over-the-Air)技术实现车辆软件的远程更新(类比手机App更新)。OTA Master作为OTA链路的核心车载ECU,负责存储云端更新包并协调升级过程。其物理载体根据OEM设计,可以是TBox(远程信息处理器)或网关自身。
OTA Master作为TBox
诊断路由路径为TBox → 网关→目标子节点ECU。与OBD诊断的DoIP端口需求一致,网关必须支持 DoIP ↔ CAN(FD)/LIN等总线协议的双向转换(下行请求:DoIP→其他协议;上行响应:其他协议→DoIP)。根据OEM的OTA升级策略,网关必须满足与之匹配的性能要求,比如说OTA在极端情况下进行整车所有ECU推包,也就是说同时对整车所有ECU进行软件更新,对于网关而言,首先必须具备并行能力,支持同时向多个不同目标ECU转发,为了追求更快的传输效率,可支持队列传输。其次,网关必须满足自身在进行软件更新时还能进行路由转发,也就是说网关自身的诊断功能与其路由功能实现必须相互独立。
下面对并行、队列概念进行说明:
- 并行:针对不同目标ECU的诊断请求/响应,简单理解就是同时转发。以并行诊断请求为例,就是网关可以同时转发多个目标ECU的诊断请求,不需要等待某个目标ECU回复诊断响应后才转发另一个目标ECU的诊断请求。
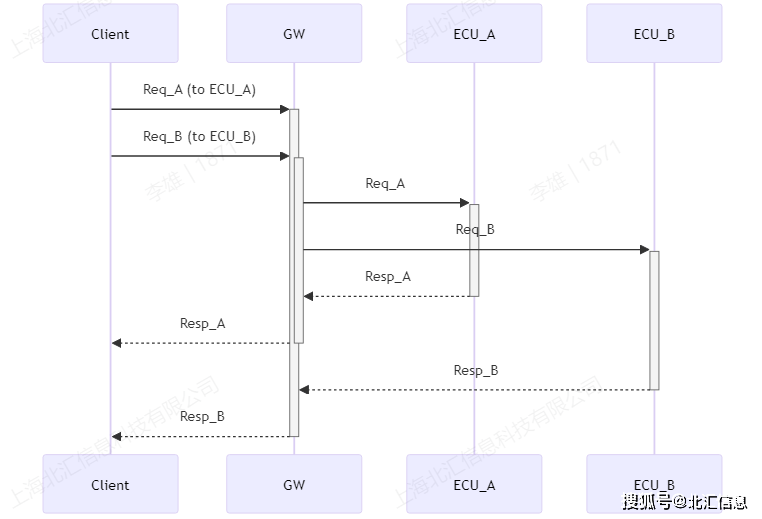
并行请求示意图编辑
- 队列:针对相同目标ECU 的诊断请求,简单理解就是同时接收,注意不是同时转发。对于相同ECU地址,必须先转发完第一个诊断请求才能转发第二个诊断请求。满足队列的网关必须支持全双工,即请求转发与响应转发可同时进行。

队列请求示意图编辑
OTA Master作为网关
OTA Master功能直接集成于网关内,此场景下,软件下载数据流不涉及跨节点的网关诊断路由功能。更新包存储在网关本地。作为OTA Master,网关需直接管理通过其连接的各总线(CAN(FD)/LIN)向子节点ECU传输更新数据(本质是网关作为源节点的点对点通信)
远程诊断路由
相较于OTA聚焦于将新软件安全写入车辆ECU(“写”操作),远程诊断的核心在于从车辆ECU读取状态信息、故障码、实时参数等数据并上报至云端服务平台(“读”操作)。其典型特征为请求频率高、单次传输数据量相对较小(与OTA软件包相比)。对于网关功能实现而言只是缓存分配和路由策略存在些许差异,需要网关具有并行处理能力和低延迟传输能力(与OTA相比对缓存要求不高)。
四、诊断路由性能介绍
综合前文分析,不同诊断路由方式(OBD/OTA/远程)在网关基础路由机制上具有高度共性,核心体现为:协议转换能力(支持DoIP ↔ CAN(FD)/LIN等总线协议的双向转换)与资源池化架构(并行处理能力与缓存资源可动态共享于不同路由场景)。其性能差异主要体现在资源调度策略优化。下文将解析三大核心性能指标:通信通道分配、缓存分配策略和路由延迟。
通信通道分配
通信通道是协议层虚拟化的独立数据传输路径,在诊断路由中可理解为:每个目标ECU地址的诊断会话独占一个逻辑通道。为满足高性能路由需求,通道分配需遵循以下核心原则:
- 通信通道资源池的规模必须大于网关最大并行处理能力
- 诊断请求通信通道和诊断响应通信通道必须隔离
- 功能寻址请求需分配专用高优先级通道
缓存分配策略
缓存本质是网关的硬件内存资源,其分配策略分为静态分配和动态分配,静态分配相较动态需预固定内存块,转发效率高但资源利用率低。无论采用何种策略,网关性能上限由以下硬性指标决定:
- 最大诊断请求/响应Buffer
- 最小诊断请求/响应Buffer个数
- 最小诊断请求/响应RAM
下面对缓存分配及硬性指标要求进行说明:
- 请求/响应缓存隔离:前文所述通信通道的请求/响应独立,那么请求和响应的缓存必须隔离。
- 最小Buffer数量定义:最小的诊断请求/响应buffer个数和网关的子节点个数相关联,当网关并行能力满足所有的子节点并行刷写要求,那么最小buffer个数和并行能力匹配即可。但是实际都是性能与成本的折中,并行能力达不到要求,这时网关需要保证路由过程中不丢帧,也就是需要有buffer先存放接收到的诊断数据,等待并行传输有资源释放之后再进行转发。此时最小的诊断请求buffer个数要求至少为子节点的个数*2+1。最小诊断响应的Buffer个数和子节点个数相同即可。
- 最大Buffer定义:最大诊断请求Buffer与整车ECU刷写数据块最大值关联,最大诊断响应Buffer与整车ECU诊断响应数据最大值关联。
- 最小RAM定义:最小诊断请求/响应RAM则为最大诊断请求/响应buffer*最小诊断请求/响应buffer个数。
当然以上要求不是绝对的,毕竟所有ECU刷写数据块最大值也不一样,实际实现需要参考所有ECU的刷写数据块峰值及覆盖诊断响应数据极值,最终在满足基本路由功能的前提下平衡性能与成本。
路由延迟
路由延迟指网关处理诊断报文并完成转发的端到端时延,是OEM的核心性能指标。比如诊断路由DoIP转CAN(FD),会明确要求单帧转发的时间或者诊断请求FF转发的时间小于10ms。针对DoIP报文路由策略,为了追求更快的路由转发,网关可能接收到DoIP诊断请求不需要在回复ACK正响应之后才转发,当然追求性能的同时会带来安全风险。反之,如果网关需要在回复ACK正响应之后才转发,则必须保证样件的回复时间(如3ms)满足要求,并且在达到最大的并行处理能力时同样需要具备该回复时间要求。对于诊断响应延迟,要求与诊断请求类似(如CAN(FD)→DoIP转发延迟≤10ms),不再赘述。
五、诊断路由性能测试方案介绍
上文已详细介绍诊断路由功能,本部分将重点阐述针对网关的诊断路由性能测试方案。
测试环境
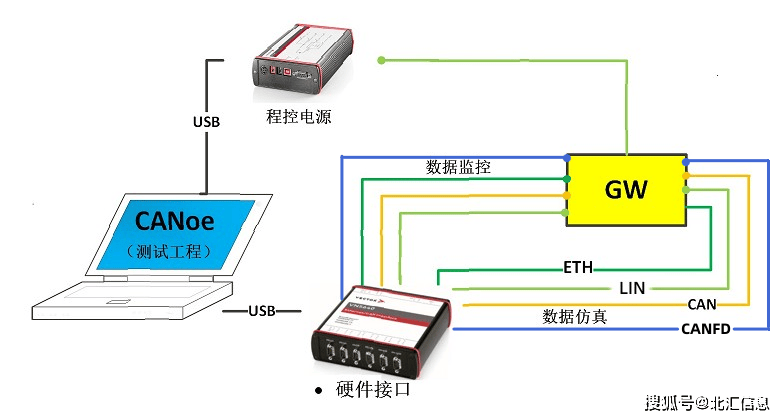
测试环境示意图
测试环境配置简洁明确:电源给GW网关控制器供电,采用专业测试工具进行数据仿真或采集。
测试流程
使用Vector CANoe搭建自动化测试工程,为验证诊断请求/响应转发的功能与性能,测试框架设计如下(后续阐述均以DoIP转CAN(FD)为例):
Tester测试模块:
- 负责与网关建立TCP连接发送DoIP诊断请求和接收DoIP诊断响应作为测试用例流程的主开发模块
仿真节点模块:
- 负责与目标子网段的所有ECU节点建立传输协议(TP)连接接收CAN FD诊断请求和发送CAN FD诊断响应
DLL动态链接库:
负责在Tester测试模块与仿真节点模块之间高效传递数据
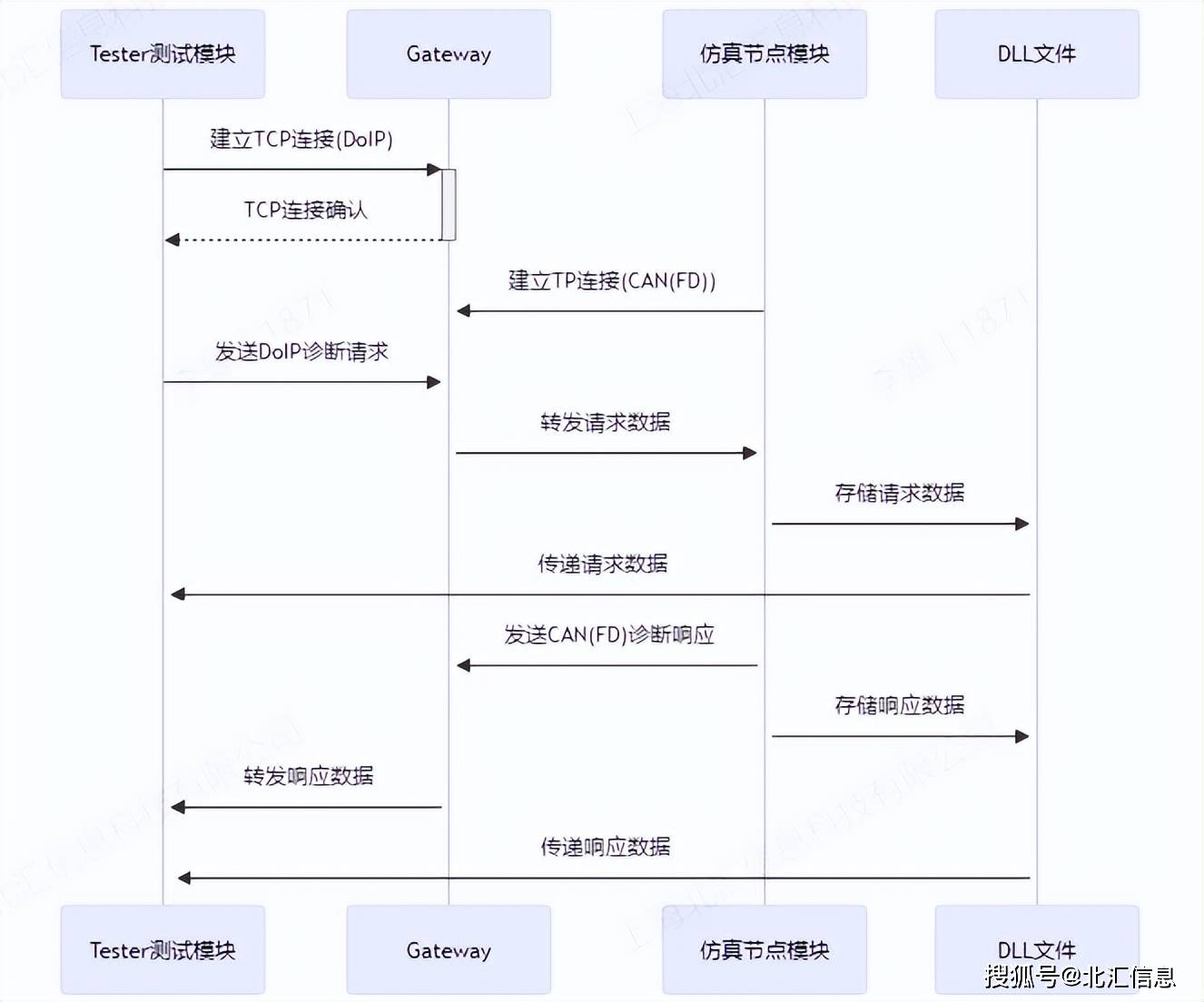
测试流程示意图
测试用例
以下列举两条关键性能测试用例:
多网段并行请求/响应路由延迟测试
测试目的:验证网关在最大并行路由情况下的转发延迟是否满足要求
测试方法:假如网关每个子网段的最大并行能力是3,测试并行请求转发则根据诊断路由表在每个子网段选择3个ECU地址仿真发送诊断请求,检测所有诊断请求首帧转出的时间。测试并行诊断响应则仿真发送功能寻址请求,等待功能寻址请求转发后根据诊断路由表在每个子网段选择3个ECU地址仿真发送诊断响应,检测所有诊断响应转发的时间。
测试报告实例:
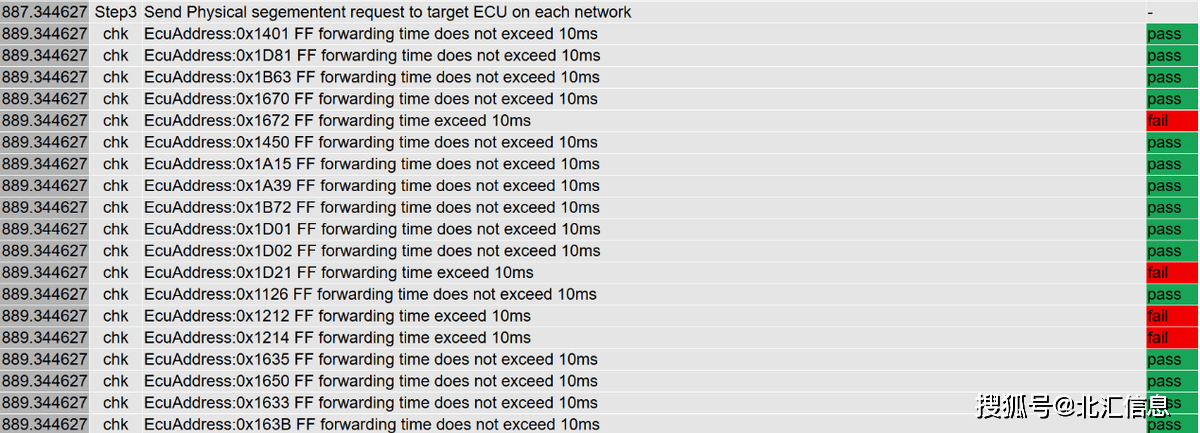
多网段并行请求路由延迟测试报告示意图编辑
多网段并行请求及响应持续转发测试
测试目的:验证网关在最大并行及队列路由情况下长时间运行的路由稳定性(模拟刷写场景,诊断请求数据可采用36服务)
测试方法:
默认会话:
默认会话一般不支持队列,即在默认会话下验证最大并行情况下的路由稳定性。假如网关每个子网段的最大并行能力是3,测试则根据诊断路由表在每个子网段选择3个ECU地址仿真发送诊断请求,每个诊断请求被路由到子网段之后仿真发送诊断响应,等待诊断响应转发到上层网段之后再仿真发送诊断请求,以此类推测试执行5min,检测过程中的所有诊断请求和响应转发是否正常。
编程会话:
验证最大并行及队列情况下的路由稳定性。假如网关每个子网段的最大并行能力是3,测试则根据诊断路由表在每个子网段选择3个ECU地址仿真队列发送诊断请求,每个诊断请求被路由到子网段之后仿真发送诊断响应,等待诊断响应转发到上层网段之后再仿真发送诊断请求,以此类推测试执行5min,检测过程中的所有诊断请求和响应转发是否正常。
测试报告实例:
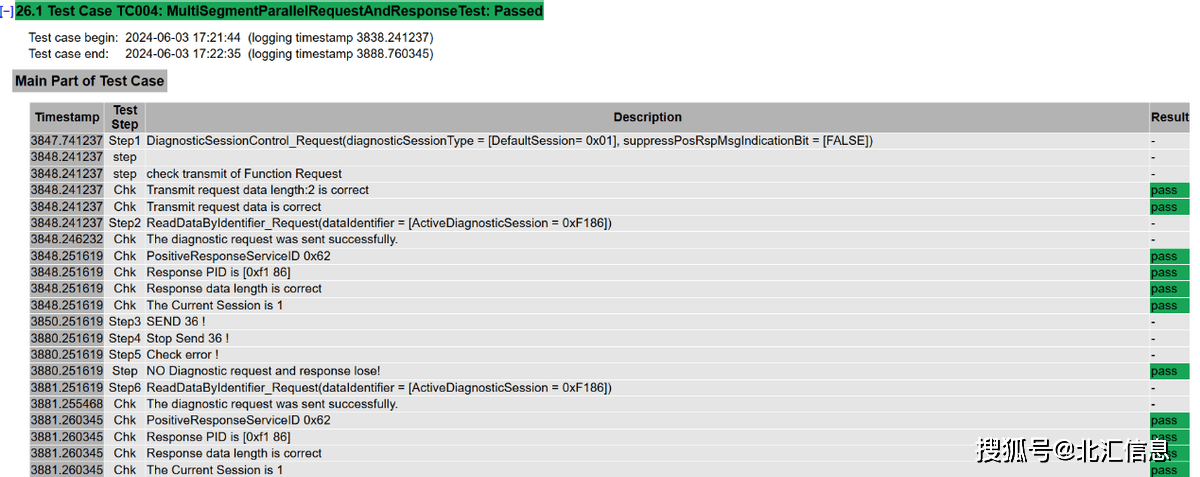
默认会话-多网段并行请求及响应持续转发测试示意图
六、总结
至此,我们已完成诊断路由功能及其性能测试方案的核心内容阐述。
北汇信息始终紧跟汽车网关技术前沿,依托与众多OEM的深度合作,深入理解各类网关路由策略与设计需求,在汽车电子测试领域积累了丰富的实践经验。如您有更深入的测试需求,欢迎随时与我们联系。
下期预告:我们将聚焦网关通信路由功能,详细解析:
- 报文路由
- 信号路由
- S2S (信号到服务路由)
敬请关注!
注:部分图片来自Vector。
参考文献:
[1] AUTOSAR_SRS_Gateway
[2] AUTOSAR_SWS_SocketAdaptor

获取更多汽车电子技术干货
更多推荐
 28
28 0
0- 0



 已为社区贡献234条内容
已为社区贡献234条内容

所有评论(0)