
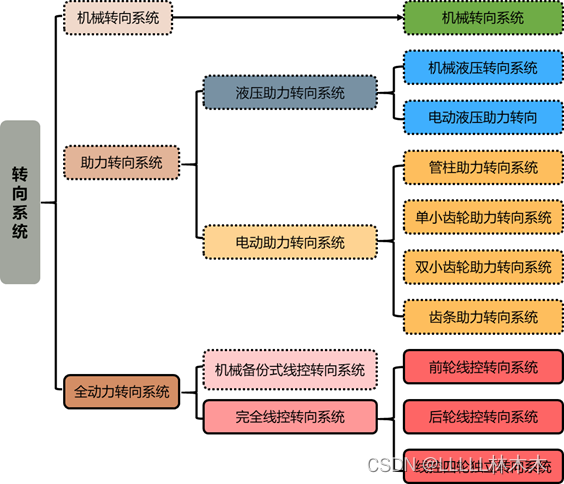
线控转向分类及应用
线控转向系统(简称SBW:Steer By Wire),是指车辆转向系 统中,取消中间传动轴,方向盘与转向机构之间,只有电线连接。转 向动力来源完全由人手以外的动力提供,即全动力转向。线控转向系 统完全通过电信号传输控制指令,转向机构与驾驶员无直接物理力矩 传输路径。配备线控转向系统的车辆,具备两种操控模式,一是自动驾驶 模式,人手不干预方向盘,车辆转向按照电脑指令动作;二是手动操 控模式,人
·
线控转向的定义
线控转向系统(简称SBW:Steer By Wire),是指车辆转向系 统中,取消中间传动轴,方向盘与转向机构之间,只有电线连接。转 向动力来源完全由人手以外的动力提供,即全动力转向。线控转向系 统完全通过电信号传输控制指令,转向机构与驾驶员无直接物理力矩 传输路径。
配备线控转向系统的车辆,具备两种操控模式,一是自动驾驶 模式,人手不干预方向盘,车辆转向按照电脑指令动作;二是手动操 控模式,人手把握方向盘,车辆操控按照人手指令动作。
随着汽车产业发展,汽车属性已从交通工具向奢侈品方向发展,用户购买汽车重点关注操控性、舒适性、安全性、智能性。辅助驾驶系统、 主动安全系统、电子智能系统逐步成为主流配置,单一系统智能无法满足用户需求,多系统智能协同成为必然趋势。多系统智能协同的关键是线 控技术,线控技术通过软件仲裁分配车辆控制权,充分发挥辅助驾驶系统价值,从而实现软件定义汽车。

●软件定义汽车首先是车辆执行机构实现线控,然后通过软件定义车辆特性。底盘是车辆运动控制的关键执行机构,故线控底盘是实 现软件定义汽车的基础。

获取更多汽车电子技术干货
更多推荐

 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)